BOSM -6025 Teenkop boor freesmasjien
1. Toerustinggebruik:
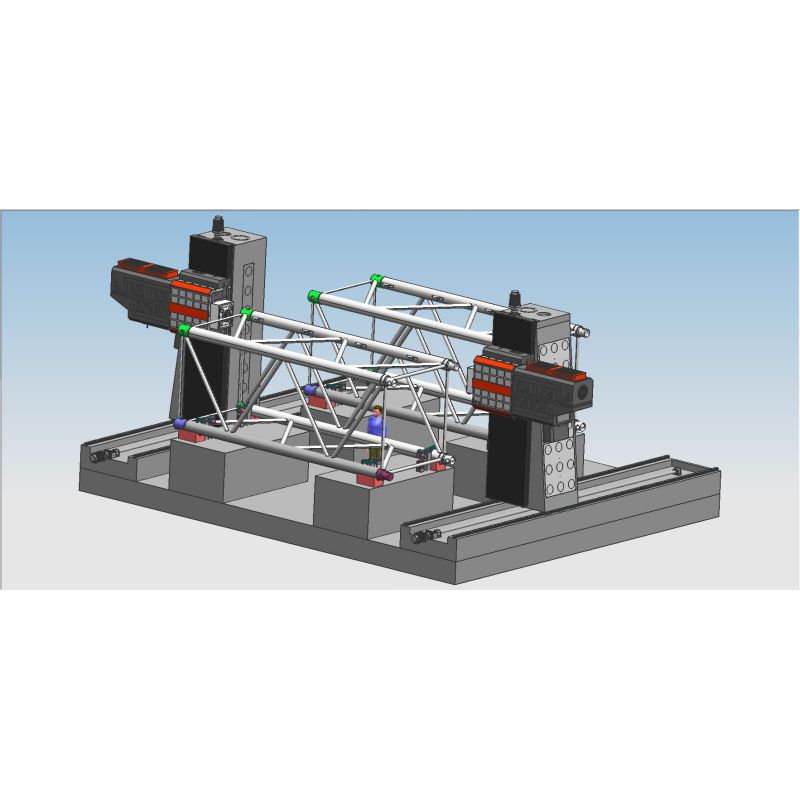
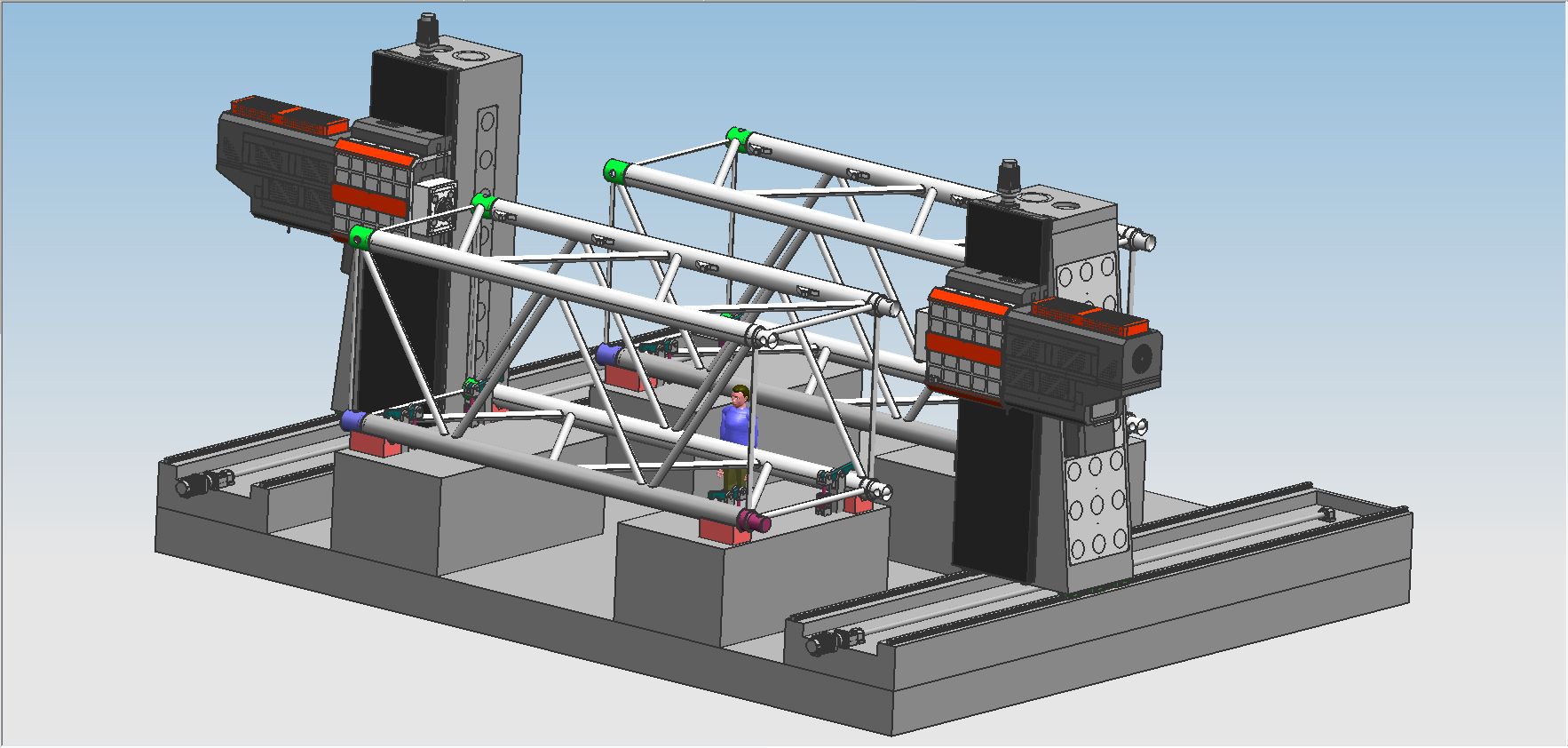
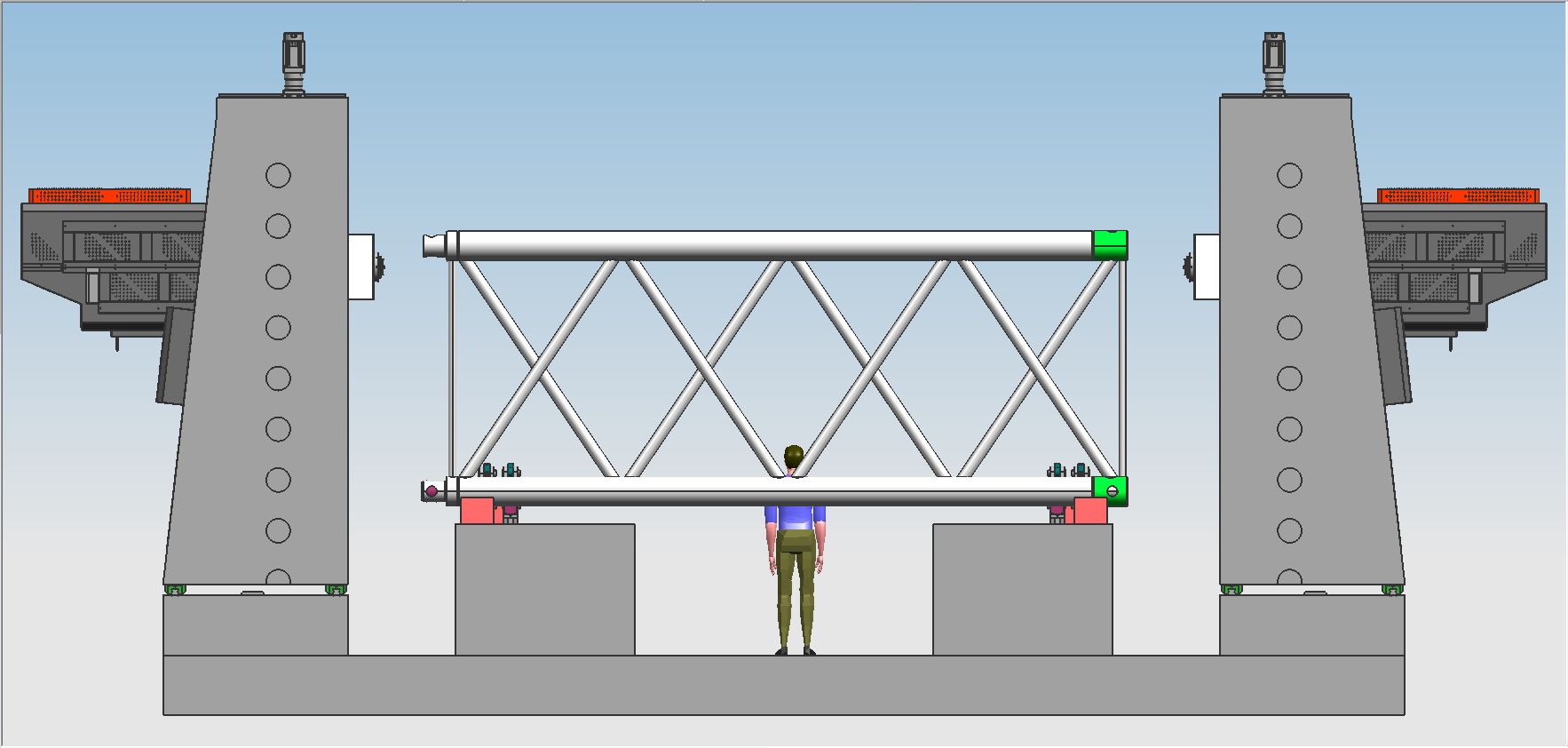
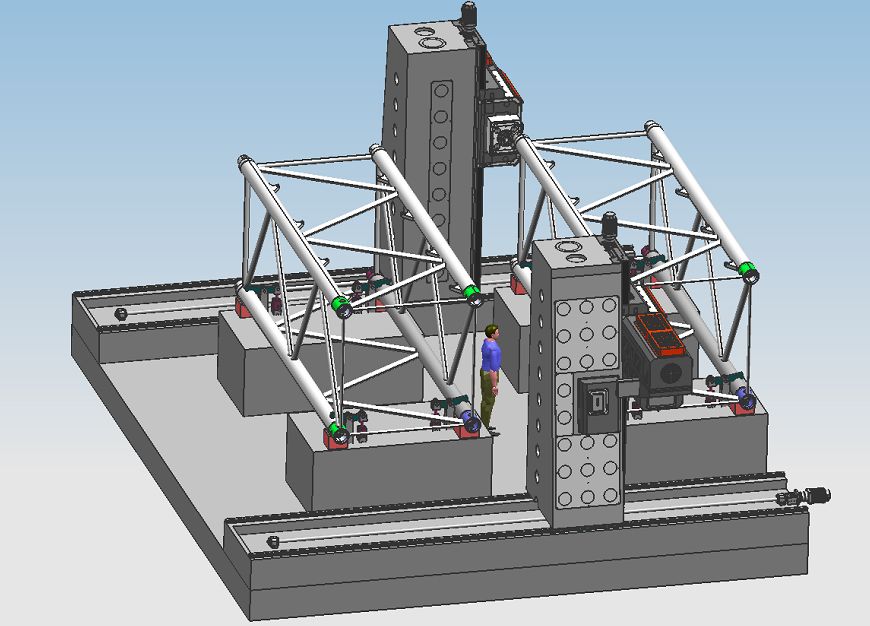
BOSM-6025 dubbelstasie, CNC vertikale kolom beweegbare dubbelkolom kop-tot-kop boor- en freesmasjien is 'n spesiale masjiengereedskap vir simmetriese werkstukke van konstruksiemasjinerie. Die masjiengereedskap is toegerus met 'n spesiale beweegbare kolom en twee stelle horisontale ramme, wat boor, frees, boor en ander verwerking van die werkstuk binne die effektiewe slagreeks kan realiseer, die werkstuk kan op 'n slag in plek verwerk word (nie nodig nie vir sekondêre klem), vinnige laai- en aflaaispoed, vinnige posisioneringspoed, hoë verwerkingsakkuraatheid en hoë verwerkingsdoeltreffendheid.
2. Toerustingstruktuur:
2.1. Hoofkomponente van die masjiengereedskap
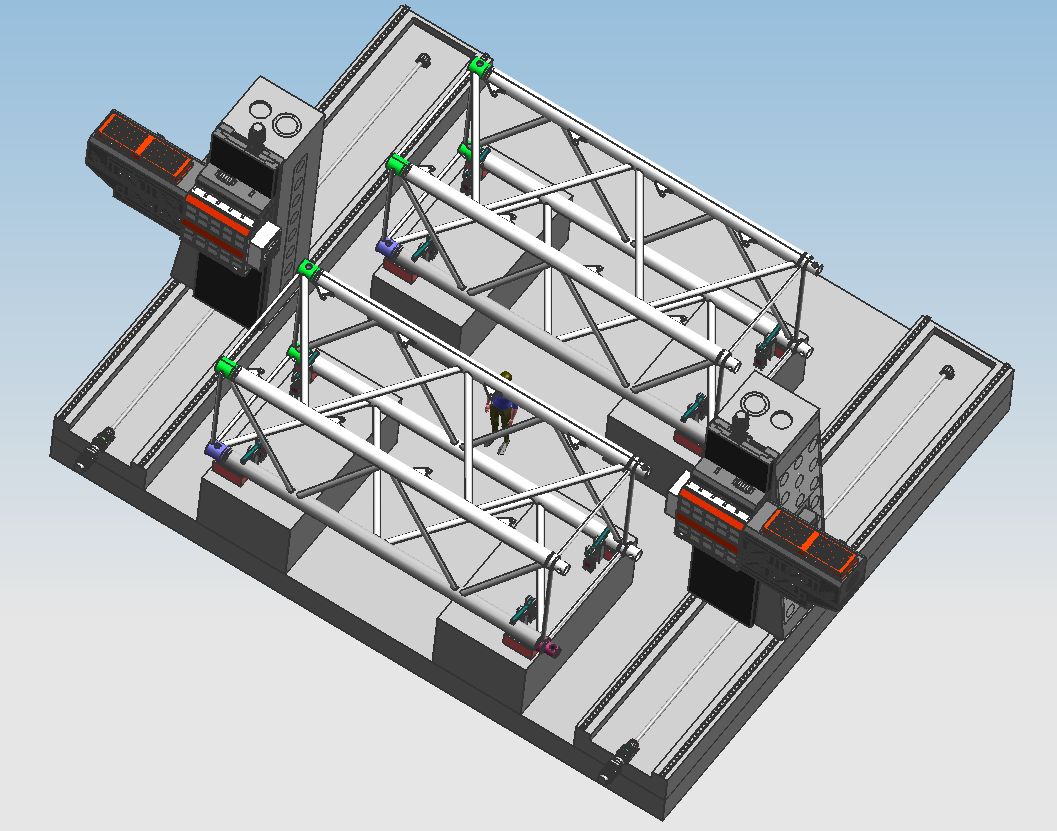
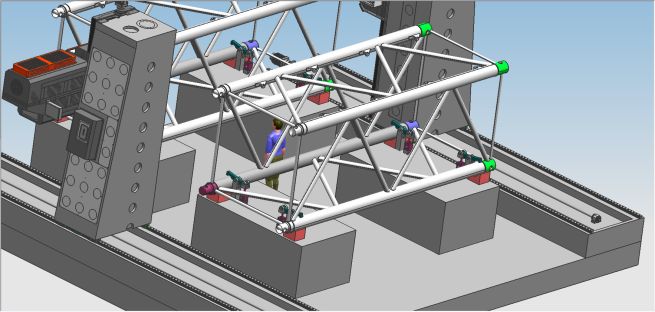
Bed, werkbank, linker en regter kolomme, balke, saals, ramme en ander groot dele is almal gemaak van hars sand gietvorm, hoë kwaliteit grys yster 250 gietwerk, uitgegloei in warm sand put → vibrasie veroudering → warm oond uitgloeiing → vibrasie veroudering → rowwe bewerking → Vibrasieveroudering → warmoondgloeiing → vibrasieveroudering → afwerking, skakel die negatiewe spanning van die dele heeltemal uit en hou die werkverrigting van die dele stabiel. Die masjiengereedskap het funksies soos frees, boor, boor, versink, tap, ens., en die gereedskapverkoelingsmetode is eksterne verkoeling. Die masjiengereedskap bevat 6 toevoer-asse, wat 4-as-koppeling en 6-as enkel- aksie. Daar is 2 kragkoppe. Die aksiale rigting van die masjiengereedskap en die kragkop word in die figuur hieronder getoon.
2. 2Die hoofstruktuur van die aksiale transmissie voer deel
2.2.1 X 1/X2-as: Die kolom beweeg in die lengte langs die leispoor van die vaste bed heen en weer.
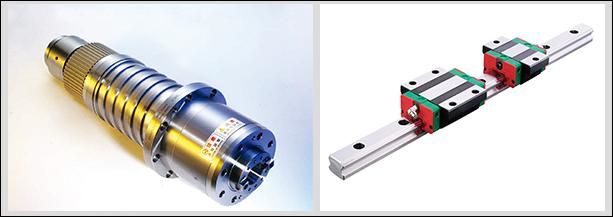
X-as-transmissie: AC-servomotor en hoë-presisie planetêre verkleiner word gebruik om die twee kolomme deur die balskroeftransmissie te dryf om die lineêre beweging van die X-as te realiseer.
Gidsrailvorm: lê twee hoësterkte presisie lineêre geleiderails.
2.2.2 Y1-as: Die kragkop en 'n ram is vertikaal aan die voorkant van die kolom geïnstalleer en beweeg links en regs langs die geleiderail van die kolom.
Y1-as transmissie: AC servomotor word gebruik om die balskroef aan te dryf om die saal aan te dryf om te beweeg, en die Y1-as lineêre beweging te realiseer.
Gidsrailvorm: 4 lineêre geleiderails + harde reling vierkantige ram gekombineer.
2.2.3 Y2-as: Die tweede ram van die kragkop is vertikaal aan die voorkant van die kolom geïnstalleer en beweeg links en regs langs die geleiderail van die kolom.
Y2-as transmissie: AC servomotor word gebruik om die balskroef aan te dryf om die saal aan te dryf om te beweeg, en die Y2-as lineêre beweging te realiseer.
Gidsrailvorm: 4 lineêre geleiderails + harde reling vierkantige ram gekombineer.
2.2.4 Z1-as: Die kragkop-skuifsaal is vertikaal aan die voorkant van die regterkolom geïnstalleer en beweeg op en af langs die kolomgeleidingsrail.
Z1-as transmissie: AC servomotor en hoë-presisie planetêre verkleiner word gebruik om die ram te dryf om deur die balskroef te beweeg om Z1-as lineêre beweging te realiseer.
Gidsrailvorm: 2 lineêre geleiderails.
2.2.5 Z2-as: Die kragkop-skuifsaal is vertikaal aan die voorkant van die regterkolom geïnstalleer en beweeg op en af langs die kolomgeleidingsrail.
Z1-as transmissie: AC servomotor plus hoë-presisie planetêre verkleiner word gebruik om die ram te dryf om deur die balskroef te beweeg om Z2-as lineêre beweging te realiseer.
Gidsrailvorm: 2 lineêre geleiderails
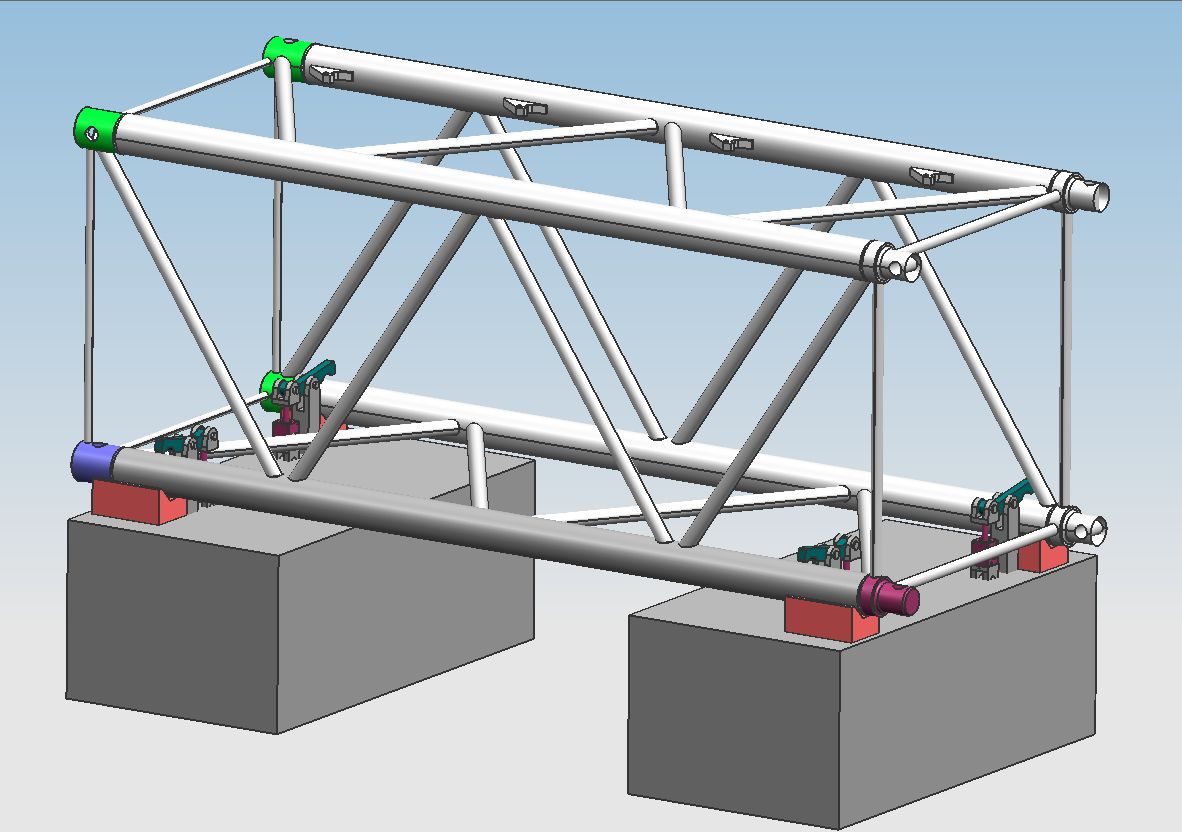
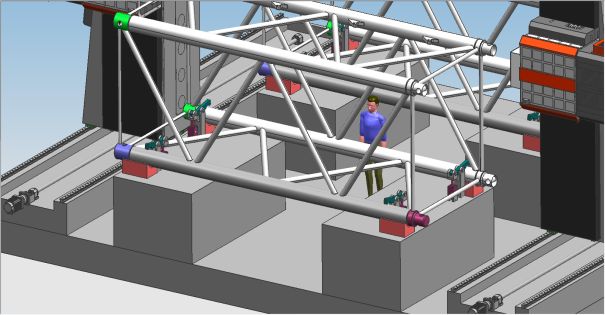
Die boor- en freeskragkop (insluitend die kragkop 1 en 2) is 'n saamgestelde vierkantige ram, en die beweegrigting word gelei deur 4 lineêre rolgeleidingsrelings. Die aandrywer gebruik 'n AC-servomotor om die presisie-kogelskroefpaar aan te dryf. Die masjien is toegerus met 'n stikstofbalansbalk. , Verminder die dravermoë van die masjienkop op die skroef en servomotor. Die Z-as-motor het 'n outomatiese remfunksie. In die geval van 'n kragonderbreking sal die outomatiese rem die motoras styf vashou sodat dit nie kan draai nie. Wanneer werk, wanneer die boorpunt nie aan die werkstuk raak nie, sal dit vinnig voer; wanneer die boorpunt aan die werkstuk raak, sal dit outomaties oorskakel na werkvoer. Wanneer die boorpunt die werkstuk binnedring, sal dit outomaties oorskakel na vinnig terugspoel; wanneer die punt van die boorpunt die werkstuk verlaat en die vasgestelde posisie bereik, sal dit na die volgende gatposisie beweeg om outomatiese sirkulasie te realiseer. En dit kan die funksies van blindegatboor, frees, afkanting, spaanderbreek, outomatiese spaanderverwydering, ens., realiseer, wat arbeidsproduktiwiteit verbeter.


Die 500 mm-slag saamgestelde vierkantige ram-kragkop gebruik lineêre leiers in plaas van tradisionele insetsels om die geleidingsakkuraatheid aansienlik te verbeter terwyl die styfheid van die vierkantige ram behou word.
2.3. Werkstuk hidrouliese vasdraai funksie
2.4Chip verwydering en verkoeling
Daar is spiraal- en plat kettingskyfievervoerbande aan beide kante onder die werkbank geïnstalleer, en die skyfies kan outomaties aan die einde deur twee stadiums van spiraal- en kettingplate na die skyfievervoerband afgevoer word om beskaafde produksie te realiseer. Daar is 'n verkoelingspomp in die koelmiddeltenk van die skyfievervoerband, wat vir eksterne verkoeling van die werktuig gebruik kan word om die werkverrigting en lewensduur van die werktuig te verseker, en die koelmiddel kan herwin word.
3. Volledige digitale numeriese beheerstelsel:
3.1. Met skyfiebreekfunksie kan skyfiebreektyd en skyfiebreeksiklus op die mens-masjien-koppelvlak ingestel word.
3.2. Met gereedskapopheffingsfunksie kan die gereedskaphefafstand op die mens-masjien-koppelvlak ingestel word. Wanneer verwerking hierdie afstand bereik, sal die gereedskap vinnig opgelig word, dan sal skyfies gegooi word, en dan vinnig vorentoe na die booroppervlak en outomaties omgeskakel word na werk.
3.3. Gesentraliseerde bedieningsbeheerkas en handeenheid neem numeriese beheerstelsel aan en is toegerus met USB-koppelvlak en LCD-vloeikristalskerm. Ten einde programmering, berging, vertoon en kommunikasie te vergemaklik, het die operasie-koppelvlak funksies soos mens-masjien dialoog, foutvergoeding en outomatiese alarm.
3.4. Die toerusting het die funksie om die gatposisie voor te bekyk en weer te inspekteer voor verwerking, en die operasie is baie gerieflik.
4. Outomatiese smering
Masjiengereedskap presisie lineêre leispoor pare, presisie bal skroef pare en ander hoë-presisie beweging pare is toegerus met outomatiese smeer stelsels. Die outomatiese smeerpomp lewer drukolie uit, en die kwantitatiewe smeeroliekamer gaan die olie binne. Nadat die oliekamer met olie gevul is, wanneer die stelseldruk tot 1.4-1.75Mpa styg, word die drukskakelaar in die stelsel gesluit, die pomp stop en die aflaaiklep ontlaai terselfdertyd. Wanneer die oliedruk in die pad tot onder 0.2Mpa daal, begin die kwantitatiewe smeermasjien die smeerpunt vul en voltooi een olievulsel. As gevolg van die akkurate olietoevoer van die kwantitatiewe olie-inspuiter en die opsporing van die stelseldruk, is die olietoevoer betroubaar, wat verseker dat daar 'n oliefilm op die oppervlak van elke kinematiese paar is, wat wrywing en slytasie verminder en die skade aan die interne struktuur wat veroorsaak word deur oorverhitting, om die akkuraatheid en lewensduur van die masjiengereedskap te verseker. In vergelyking met die glygeleiderailpaar, het die rollende lineêre geleiderailpaar wat in hierdie masjiengereedskap gebruik word 'n reeks voordele:
① Hoë bewegingsensitiwiteit, die wrywingskoëffisiënt van die rollende geleidingsspoor is klein, slegs 0,0025-0,01, en die dryfkrag word aansienlik verminder, wat slegs gelykstaande is aan 1 van gewone masjinerie. /10. ② Die verskil tussen dinamiese en statiese wrywing is baie klein, en die opvolgprestasie is uitstekend, dit wil sê die tydinterval tussen die dryfsein en die meganiese aksie is uiters kort, wat bevorderlik is om die reaksiespoed en sensitiwiteit van die numeriese beheerstelsel.
③ Dit is geskik vir 'n hoë-spoed lineêre beweging, en sy oombliklike spoed is ongeveer 10 keer hoër as dié van gly geleidingsrails. ④ Dit kan gapingslose beweging realiseer en die bewegingstyfheid van die meganiese stelsel verbeter. ⑤ Geproduseer deur professionele vervaardigers, dit het hoë presisie, goeie veelsydigheid en maklike onderhoud.
5. As laser inspeksie:
Elke masjien van Bosman word gekalibreer deur die laser interferometer van RENISHAW maatskappy in die Verenigde Koninkryk om die toonhoogte fout, terugslag, posisionering akkuraatheid, herhaalde posisionering akkuraatheid, ens., akkuraat te inspekteer en te vergoed om die dinamiese, statiese stabiliteit en verwerkingsakkuraatheid van die masjien. Ballbar-inspeksie Elke masjien gebruik 'n ballbar van die Britse RENISHAW-maatskappy om die ware sirkelakkuraatheid en masjiengeometriese akkuraatheid te kalibreer, en terselfdertyd sirkelvormige sny-eksperimente uit te voer om die 3D-bewerkingsakkuraatheid en sirkelakkuraatheid van die masjien te verseker.


6Masjien gereedskap omgewing:
6.1. Toerusting gebruik omgewing vereistes
Die handhawing van 'n konstante vlak van omgewingstemperatuur is 'n noodsaaklike faktor vir presisie bewerking.
(1) Die bruikbare omgewingstemperatuurvereiste is -10 ℃ ~ 35 ℃, wanneer die omgewingstemperatuur 20 ℃ is, moet die humiditeit 40 ~ 75% wees.
(2) Om die statiese akkuraatheid van die masjiengereedskap binne die gespesifiseerde reeks te hou, vereis die optimum omgewingstemperatuur 15°C tot 25°C, en die temperatuurverskil
Moet nie ±2°C/24h oorskry nie.
6.1.2. Kragtoevoerspanning: 3 fases, 380V, binne die omvang van ±10% spanningskommeling, kragtoevoerfrekwensie: 50HZ.
6.1.3. As die spanning in die gebruiksgebied onstabiel is, moet die masjiengereedskap toegerus wees met 'n gestabiliseerde kragtoevoer om die normale werking van die masjiengereedskap te verseker.
6.1.4. Die masjiengereedskap moet betroubare aarding hê: die aarddraad is 'n koperdraad, die draaddeursnee moet nie minder as 10 mm² wees nie, en die aardingsweerstand moet minder as 4 Ω wees.
6.1.5. Om die normale werkverrigting van die toerusting te verseker, as die saamgeperste lug van die lugbron nie aan die vereistes van die lugbron kan voldoen nie, moet dit op die masjiengereedskap geïnstalleer word.
Voeg 'n stel lugbronsuiweringstoestelle (ontvochtiging, ontvetting, filtreer) voor die lug by.
6.1.6. Hou die toerusting weg van direkte sonlig, vibrasie- en hittebronne, hoëfrekwensie-opwekkers, elektriese sweismasjiene, ens., om masjiengereedskapproduksie mislukking of verlies aan masjiengereedskapakkuraatheid te vermy.
7. Ttegniese parameters:
| Model | 6025-6Z | |
| Verwerking werkstuk grootte | Lengte × breedte × hoogte (mm) | 6000× 2300×2300 |
| Portaal maksimum voer | Breedte (mm) | 6800 |
| werkende lessenaar grootte | Lengte X Breedte (mm) | 3000*1000 =4 |
| Kolomreis | Kolom beweeg heen en weer (mm) | 7 000 |
| Dubbelram-hysbak op en af | Op en af slag van ram (mm) | 2500 |
| Spilmiddel tot tafelvlakafstand | 0-2500 mm | |
|
Horisontale ram tipe boorkop krag kop een twee
| Hoeveelheid (2) | 2 |
| Spil taps | BT50 | |
| Boor deursnee (mm) | Φ2-Φ60 | |
| Tapdeursnee (mm) | M3-M30 | |
| Spilspoed (r/min) | 30~5000 | |
| Servo spil motor krag (kw) | 37*2 | |
| Links en regs reisafstand tussen twee spilpunte | 5800-6800mm | |
| Linker- en regterslag van ram (mm) | 500 | |
| Tweerigting-posisionering akkuraatheid | 300mm*300mm | ±0,025 |
| Tweerigting herhaalde posisionering akkuraatheid | 300mm*300mm | ±0,02 |
| Masjiengereedskapafmetings | Lengte × breedte × hoogte (mm) | Volgens die tekeninge (as daar veranderinge in die ontwerpproses is, sal ons u in kennis stel) |
| Bruto gewig (t) | 72T | |